Lane Specific Traffic Flow Control Models
In this project, we aim to find the best lane! Should you take the right or the left lane in the traffic flow? Which lane will go faster? Which lane will be more comfortable; where do you need to accelerate and brake a lot? But also, In what lane can you facilitate this fast and comfortable trip for others, and how much do you need to give in?
Currently, traffic control applications are limited to the roadway level. There is a need for lane specific traffic control measures which can make optimum use of all the lanes by influencing the “longitudinal” and “lateral” behaviour of road users. Longitudinal refers to the direction in which the vehicle is moving while lateral refers to the sideways movement like lane changes. It has been observed that more traffic tends to use the median and centre lane when the traffic density (number of vehicles per unit length of roadway) is high. The outside lane is not fully utilized when flow reaches capacity.

Researcher


Figure 1: Unbalanced lane usage at capacity.
Principal Investigator
PostDoc Researchers
PhD Researchers
Supervisors
Instrumented Vehicles
Underutilization of lanes on multi-lane motorways can lead to traffic jams setting in on heavily used lanes, while capacity is still available on other lanes. This project aims at developing a first of its kind lane specific motorway traffic control system to reduce the individual travel times, improve the overall traffic flow efficiency on multi-lane highways by optimizing the distribution of traffic over the lanes.
In order to develop such advisory systems, it is quite important to estimate the current state and predict the future state of traffic networks on a lane level. This will help in understanding when to generate the advices and send them to the road users. The traffic state is primarily characterized by the average speed and the number of vehicles flowing over a section of the road.
It is quite difficult to measure the traffic variables with the existing infrastructure. Hence it is important to develop a technique which can estimate the current state of traffic with the limited amount of information available and is also able to combine data collected from multiple sources. Whereas traffic state estimation describe the current state of traffic, the prediction methods try to describe the state of traffic sometime in the future. For a good prediction model, it is important to understand the individual driver behavior and the causes of lane changes on highways. The extent to which the drivers plan their path ahead and the time horizon they are taking into account are important in understanding the dynamics of the system.
Finally, these estimation and prediction models are integrated to develop a control model which will generate suitable advices to be given to the road users at the appropriate times. Advices can be in the form of what speeds to maintain, which lanes to use, when to change lanes and when not to etc. The approach to the lane specific control is shown in the figure.
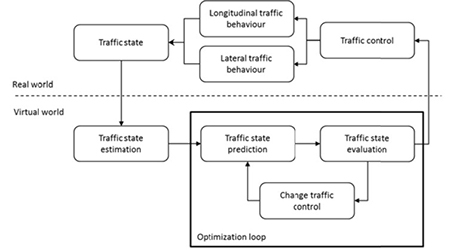


Figure 2: Conceptual approach to the lane specific control model
Of course, the success of such kind of systems depend on the compliance of the road users to such advices. People may be inclined to not follow advices such as reducing the speed but they must understand the balance between achieving individual and system advantage. Remember, it is always better to drive a bit slowly than getting stuck in endless queues. These advices can possibly help in reducing the workload on the road users making driving a more pleasant experience.
References
Hoogendoorn, S.P. & P.H.L. Bovy (2007), Generic Driving Behavior Modeling by Differential Game Theory, Proceedings Traffic and Granular Flow 2007, pp. 321-331. HTSM.
Ou, Q. (2012), Fusing Heterogeneous Traffic Data, PhD thesis, Delft University of Technology, TRAIL Thesis Series T 2011/5, Delft, the Netherlands.
Schakel, W.J. & B. van Arem (2013), Improving traffic flow efficiency by In-car advice on lane, speed and headway, In Transportation Research Board 92nd Annual Meeting, Washington DC. Submitted to IEEE Transactions on ITS.
Knoop, V. L., Duret, A., Buisson, C., & Van Arem, B. (2010). Lane distribution of traffic near merging zones influence of variable speed limits. Paper presented at the IEEE Conference on Intelligent Transportation Systems, Proceedings, ITSC, 485-490.
Knoop, V.L., Hoogendoorn, S.P., Yasuhiro, S., and Buisson, Ch., (2012) Quantifying the Number of Lane Changes in Traffic: Empirical Analysis, Transportation Research Records No. 2278, Pages 31-41.